NECS
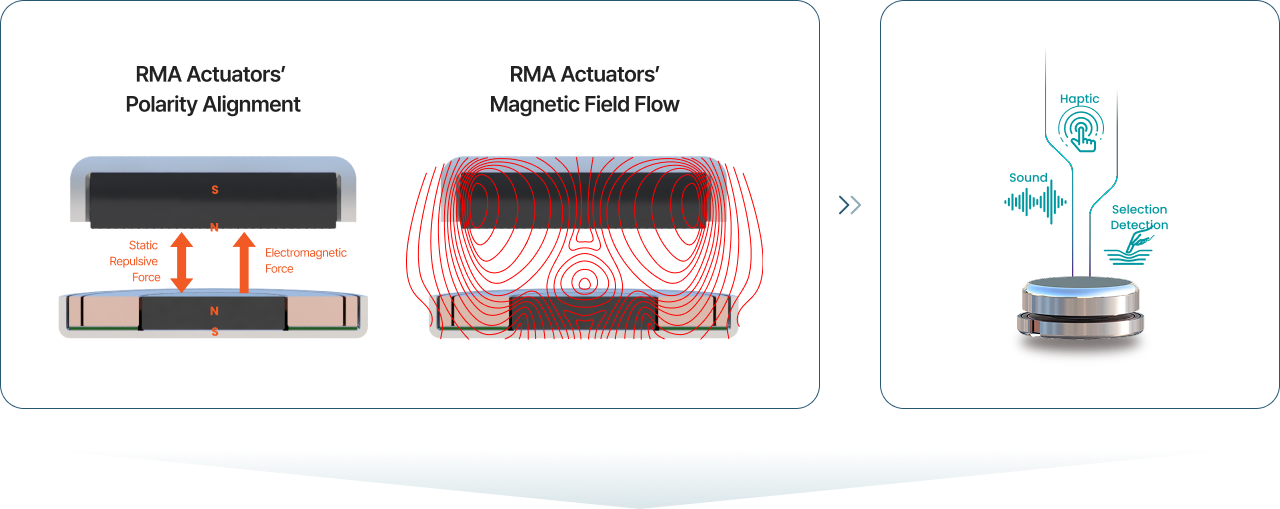
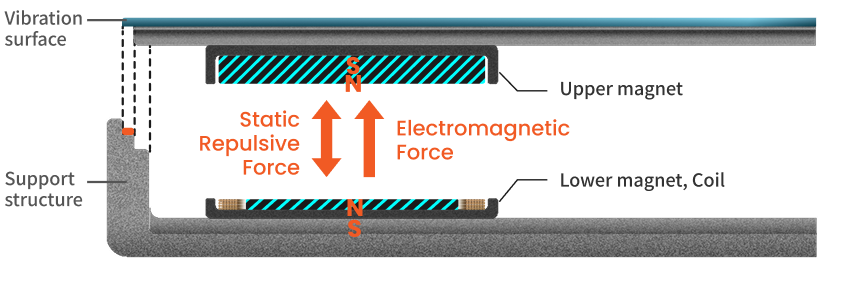
The lower magnet–coil assembly is mounted to the device’s bottom frame or directly to the PCB, while the upper magnet is mounted to the top frame or a vibration plate, maintaining a constant air gap. With like poles facing each other, a repulsive force acts between the two magnets, helping maintain the designed gap and providing a consistent preload. The upper and lower structures are connected via a suspension system. When voltage is applied to the coil, the resulting electromagnetic (Lorentz) force drives vibration by pushing or pulling the upper structure.
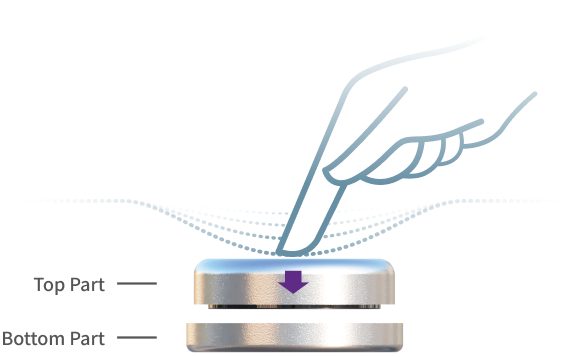
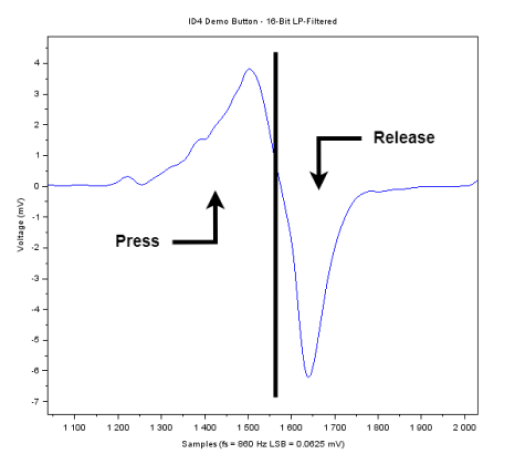
A magnetic field exists between the two magnets in the RMA. When external interaction changes the gap between them, the magnetic flux through the coil changes and generates an induced electromotive force. Any change in the magnet-to-magnet distance caused by a finger touch, a press through a cover lens, or interaction with nearby materials such as plastic or metal produces an induced voltage signal that can be used as sensing data.
With this built-in sensing capability, the RMA can replace separate touch or pressure sensors used as haptic triggers in a wide range of electronic devices.
The RMA is a repulsive magnetic actuator in which two magnets are arranged with like poles (e.g., N–N or S–S) facing each other, creating a baseline repulsive force. The lower magnet–coil assembly (input side) is rigidly fixed to the base structure, while the upper magnet (output side), without a coil, is bonded to a vibration plate/structure using a high-temperature-resistant adhesive.
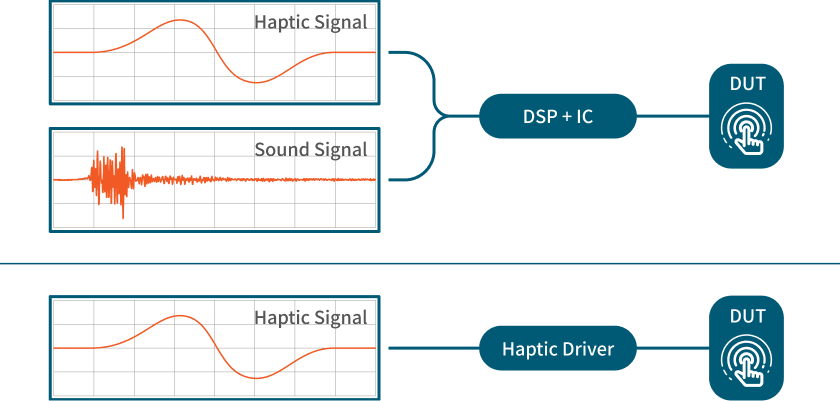
During operation, applying a voltage to the coil causes current to flow, generating an electromagnetic (Lorentz) force that modulates the net magnetic force between the two magnets. This enables precise control of the actuator’s push–pull force and vibration amplitude.
By tailoring the amplitude, waveform, and duration of the input voltage, the actuator can deliver both sophisticated haptic feedback and audio output as intended by the developer.
주식회사 넥스(이하 ‘회사’라 한다)는 개인정보 보호법 제30조에 따라 정보 주체의 개인정보를 보호하고 이와 관련한 고충을 신속하고 원활하게 처리할 수 있도록 하기 위하여 다음과 같이 개인정보 처리지침을 수립, 공개합니다.
제1조 (개인정보의 처리목적)
회사는 다음의 목적을 위하여 개인정보를 처리합니다. 처리하고 있는 개인정보는 다음의 목적 이외의 용도로는 이용되지 않으며, 이용 목적이 변경되는 경우에는 개인정보보호법 제18조에 따라 별도의 동의를 받는 등 필요한 조치를 이행할 예정입니다.
1. 고충 처리
민원인의 신원 확인, 민원사항 확인, 사실조사를 위한 연락․통지, 처리 결과 통보 등의 목적으로 개인정보를 처리합니다.
제2조 (개인정보의 처리 및 보유기간)
① 회사는 법령에 따른 개인정보 보유, 이용 기간 또는 정보주체로부터 개인정보를 수집 시에 동의 받은 개인정보 보유, 이용 기간 내에서 개인정보를 처리, 보유합니다.
② 각각의 개인정보 처리 및 보유 기간은 다음과 같습니다.
1. 재화 또는 서비스 제공 : 재화․서비스 공급완료 및 요금결제․정산 완료 시까지
다만, 다음의 사유에 해당하는 경우에는 해당 기간 종료 시까지
1) 「전자상거래 등에서의 소비자 보호에 관한 법률」에 따른 표시․광고, 계약내용 및 이행 등 거래에 관한 기록
– 표시․광고에 관한 기록 : 6월
– 계약 또는 청약 철회, 대금결제, 재화 등의 공급기록 : 5년
– 소비자 불만 또는 분쟁 처리에 관한 기록 : 3년
2) 「통신비밀보호법」 제41조에 따른 통신사실확인자료 보관
– 가입자 전기통신일시, 개시․종료 시간, 상대방 가입자 번호, 사용도수, 발신기지국 위치추적자료 : 1년
– 컴퓨터 통신, 인터넷 로그 기록자료, 접속지 추적자료 : 3개월
제3조(정보주체 및 법정대리인의 권리와 그 행사 방법)
① 정보주체는 회사에 대해 언제든지 다음 각 호의 개인정보 보호 관련 권리를 행사할 수 있습니다.
1. 개인정보 열람 요구
2. 오류 등이 있을 경우 정정 요구
3. 삭제요구
4. 처리정지 요구
② 제1항에 따른 권리 행사는 회사에 대해 서면, 전화, 전자우편, 모사전송(FAX) 등을 통하여 하실 수 있으며 회사는 이에 대해 지체없이 조치하겠습니다.
③ 정보주체가 개인정보의 오류 등에 대한 정정 또는 삭제를 요구한 경우에는 회사는 정정 또는 삭제를 완료할 때까지 당해 개인정보를 이용하거나 제공하지 않습니다.
④ 제1항에 따른 권리 행사는 정보주체의 법정대리인이나 위임을 받은 자 등 대리인을 통하여 하실 수 있습니다. 이 경우 개인정보 보호법 시행규칙 별지 제11호 서식에 따른 위임장을 제출하셔야 합니다.
⑤ 정보주체는 개인정보 보호법 등 관계 법령을 위반하여 회사가 처리하고 있는 정보주체 본인이나 타인의 개인정보 및 사생활을 침해하여서는 아니 됩니다.
제4조(처리하는 개인정보 항목)
회사는 다음의 개인정보 항목을 처리하고 있습니다.
1. 재화 또는 서비스 제공
필수항목 : 웹사이트 내 각 문의폼 항목에 따름
선택항목 : 웹사이트 내 각 문의폼 항목에 따름
제5조(개인정보의 파기)
① 회사는 개인정보 보유 기간의 경과, 처리목적 달성 등 개인정보가 불필요하게 되었을 때에는 지체없이 해당 개인정보를 파기합니다.
② 정보주체로부터 동의받은 개인정보 보유 기간이 경과하거나 처리목적이 달성되었음에도 불구하고 다른 법령에 따라 개인정보를 계속 보존하여야 하는 경우에는, 해당 개인정보를 별도의 데이터베이스(DB)로 옮기거나 보관장소를 달리하여 보존합니다.
③ 개인정보 파기의 절차 및 방법은 다음과 같습니다.
1. 파기 절차
회사는 파기 사유가 발생한 개인정보를 선정하고, 회사의 개인정보 보호책임자의 승인을 받아 개인정보를 파기합니다.
2. 파기 방법
회사는 전자적 파일 형태로 기록․저장된 개인정보는 기록을 재생할 수 없도록 파기하며, 종이 문서에 기록․저장된 개인정보는 분쇄기로 분쇄하거나 소각하여 파기합니다.
제6조(개인정보의 안전성 확보조치)
회사는 개인정보의 안전성 확보를 위해 다음과 같은 조치를 하고 있습니다.
1. 관리적 조치 : 내부관리계획 수립 및 시행, 정기적 직원 교육 등
2. 기술적 조치 : 개인정보처리시스템 등의 접근 권한 관리, 접근통제시스템 설치, 고유 식별정보
등의 암호화, 보안프로그램 설치
3. 물리적 조치 : 전산실, 자료보관실 등의 접근통제
제7조(개인정보 자동 수집 장치의 설치∙운영 및 거부에 관한 사항)
① 회사는 이용자에게 개별적인 맞춤 서비스를 제공하기 위해 이용정보를 저장하고 수시로 불러오는 ‘쿠키(cookie)’를 사용합니다.
② 쿠키는 웹사이트를 운영하는데 이용되는 서버(http)가 이용자의 컴퓨터 브라우저에 보내는 소량의 정보이며 이용자들의 PC 또는 모바일에 저장됩니다.
③ 정보주체는 웹 브라우저 옵션 설정을 통해 쿠키 허용, 차단 등의 설정을 할 수 있습니다. 다만, 쿠키 저장을 거부할 경우 맞춤형 서비스 이용에 어려움이 발생할 수 있습니다.
▶ 웹 브라우저에서 쿠키 허용/차단
– 크롬(Chrome) : 웹 브라우저 설정 > 개인정보 보호 및 보안 > 인터넷 사용기록 삭제
– 엣지(Edge) : 웹 브라우저 설정 > 쿠키 및 사이트 권한 > 쿠키 및 사이트 데이터 관리 및 삭제
▶ 모바일 브라우저에서 쿠키 허용/차단
– 크롬(Chrome) : 모바일 브라우저 설정 > 개인정보 보호 및 보안 > 인터넷 사용기록 삭제
– 사파리(Safari) : 모바일 기기 설정 > 사파리(Safari) > 고급 > 모든 쿠키 차단
– 삼성 인터넷 : 모바일 브라우저 설정 > 인터넷 사용 기록 > 인터넷 사용 기록 삭제
④ 회사는 서비스 이용과정에서 사용자가 방문한 각 서비스와 웹 사이트들에 대한 방문 및 이용형태, 인기 검색어, 보안접속 여부 등을 파악하여 이용자에게 최적화된 정보 제공을 위해 수집・이용하고 있습니다.
제8조(개인정보 보호책임자)
① 회사는 개인정보 처리에 관한 업무를 총괄해서 책임지고, 개인정보 처리와 관련한 정보주체의 불만 처리 및 피해구제 등을 위하여 아래와 같이 개인정보 보호책임자를 지정하고 있습니다.
▶ 개인정보 보호책임자
성명 : –
직책 : 대표
연락처 : ???
※ 개인정보 보호 담당부서로 연결됩니다.
▶ 개인정보 보호 담당부서
부서명 : 경영지원팀
연락처 :
② 정보주체께서는 회사의 서비스(또는 사업)을 이용하시면서 발생한 모든 개인정보 보호 관련 문의, 불만 처리, 피해구제 등에 관한 사항을 개인정보 보호책임자 및 담당부서로 문의하실 수 있습니다. 회사는 정보주체의 문의에 대해 지체없이 답변 및 처리해드릴 것입니다.
제9조(개인정보 열람청구)
정보주체는 개인정보 보호법 제35조에 따른 개인정보의 열람 청구를 아래의 부서에 할 수 있습니다. 회사는 정보주체의 개인정보 열람 청구가 신속하게 처리되도록 노력하겠습니다.
▶ 개인정보 열람청구 접수․처리 부서
부서명 : 경영지원팀
연락처 : TEL: | E-mail:
제10조(권익침해 구제 방법)
정보주체는 아래의 기관에 대해 개인정보 침해에 대한 피해구제, 상담 등을 문의하실 수 있습니다.
1. 개인정보 분쟁조정위원회 : (국번없이) 1833-6972 (www.kopico.go.kr)
2. 개인정보침해신고센터 : (국번없이) 118 (privacy.kisa.or.kr)
3. 대검찰청 : (국번없이) 1301 (www.spo.go.kr)
4. 경찰청 : (국번없이) 182 (ecrm.police.go.kr/minwon/main)
제11조(개인정보 처리방침 시행 및 변경)
이 개인정보 처리방침은 2026. 02. 01. 부터 적용됩니다.